Exoskeleton Race
Robotic exoskeletons are devices that enable paraplegic individuals to stand upright, walk, or climb and descend stairs. Even though robotic exoskeletons for paraplegics have been in development since the late 1960s and early 1970s, the technology has not matured to a point where the devices are accepted by the end-users.
More on Exoskeleton RaceExoskeleton Race Tasks

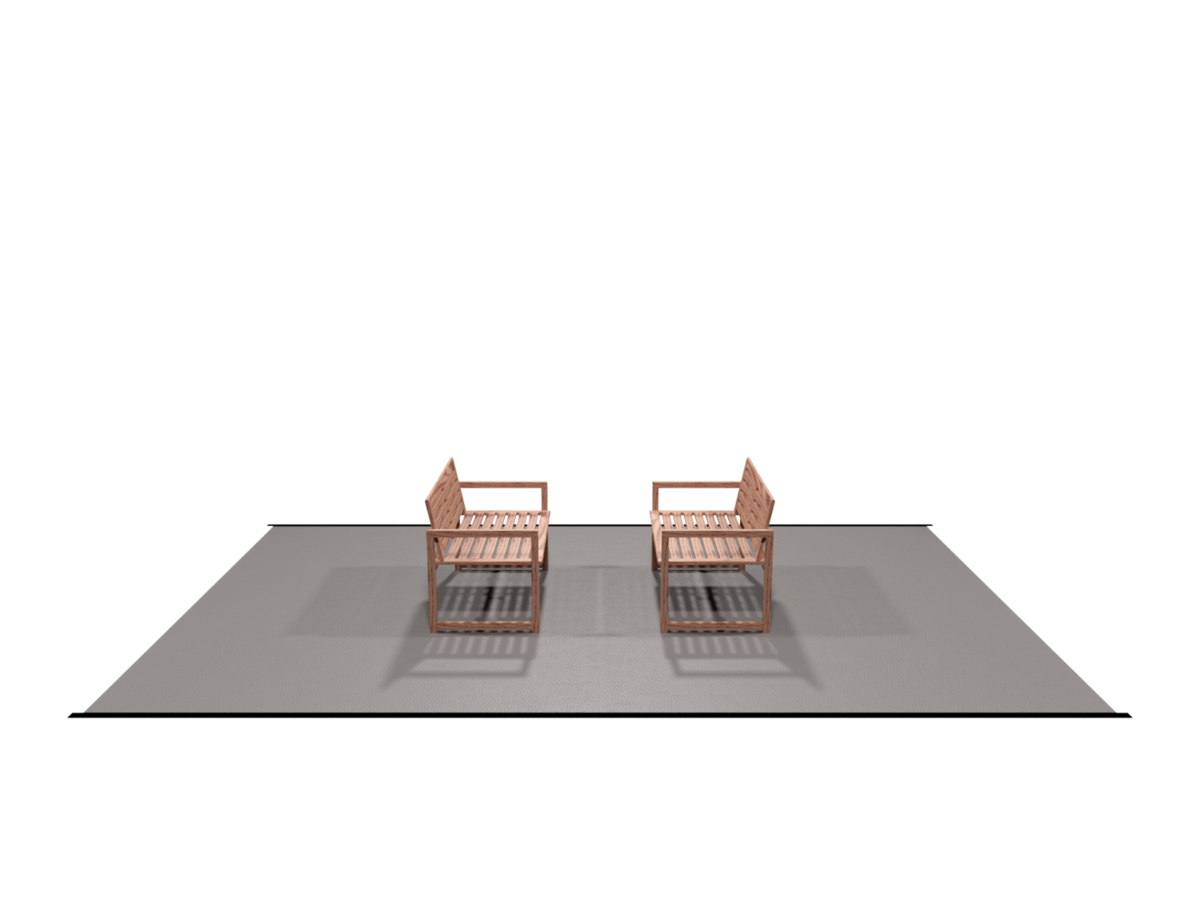
1. Train Compartment
Taking a seat and standing up are challenging when using an exoskeleton. Balance must be kept while substantial moments of the knee and hip joints must be generated and controlled.
In this task, pilots are challenged to take a seat on a bench and get up again. Restricted space conditions, such as those found in a theatre or public transportation, make the task even more difficult.

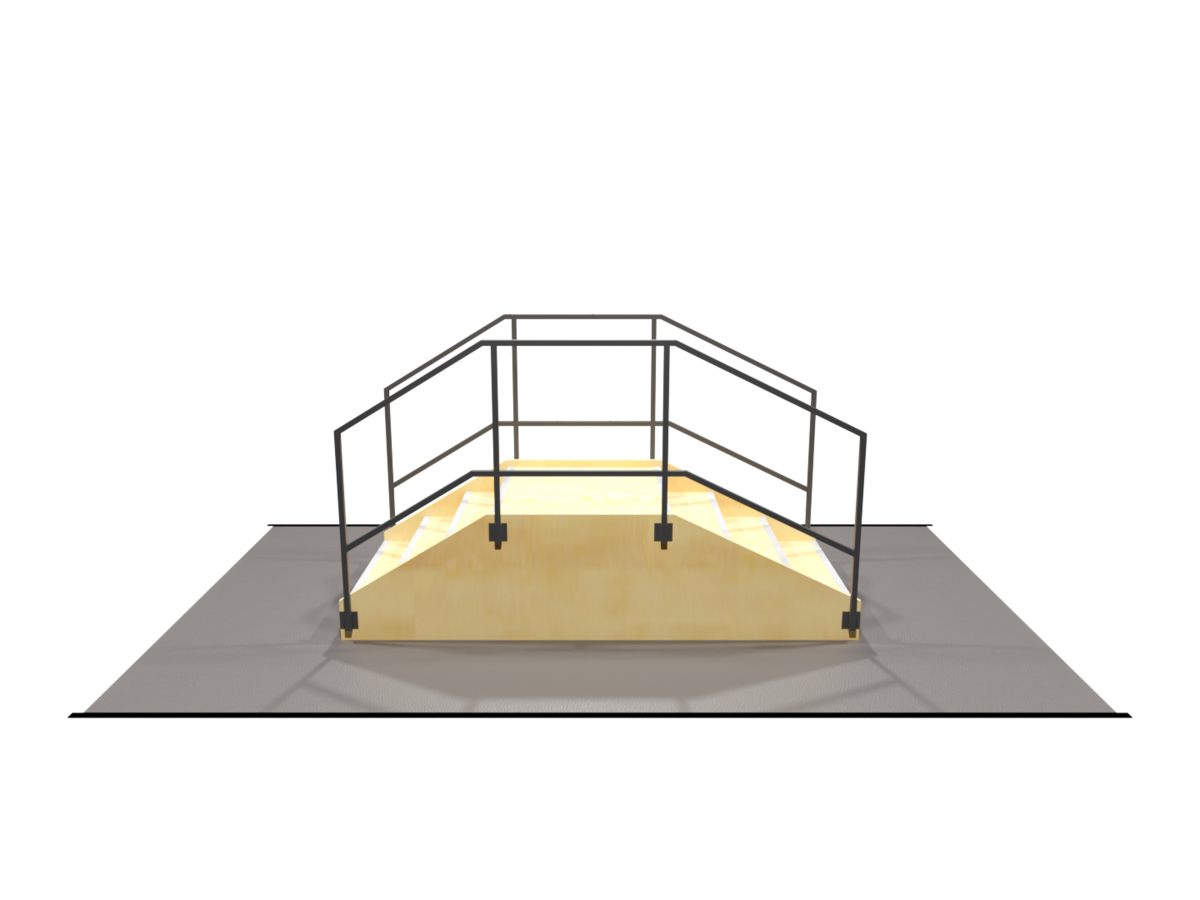
2. Stairs
Stairs are very common in daily life, both in the private and the public space. Stair climbing in powered exoskeletons is challenging since body balance must be always maintained while the exoskeleton must be very powerful to lift the user to the next step.
In this task, pilots must ascend and descend a flight of stairs without the use of a handrail.

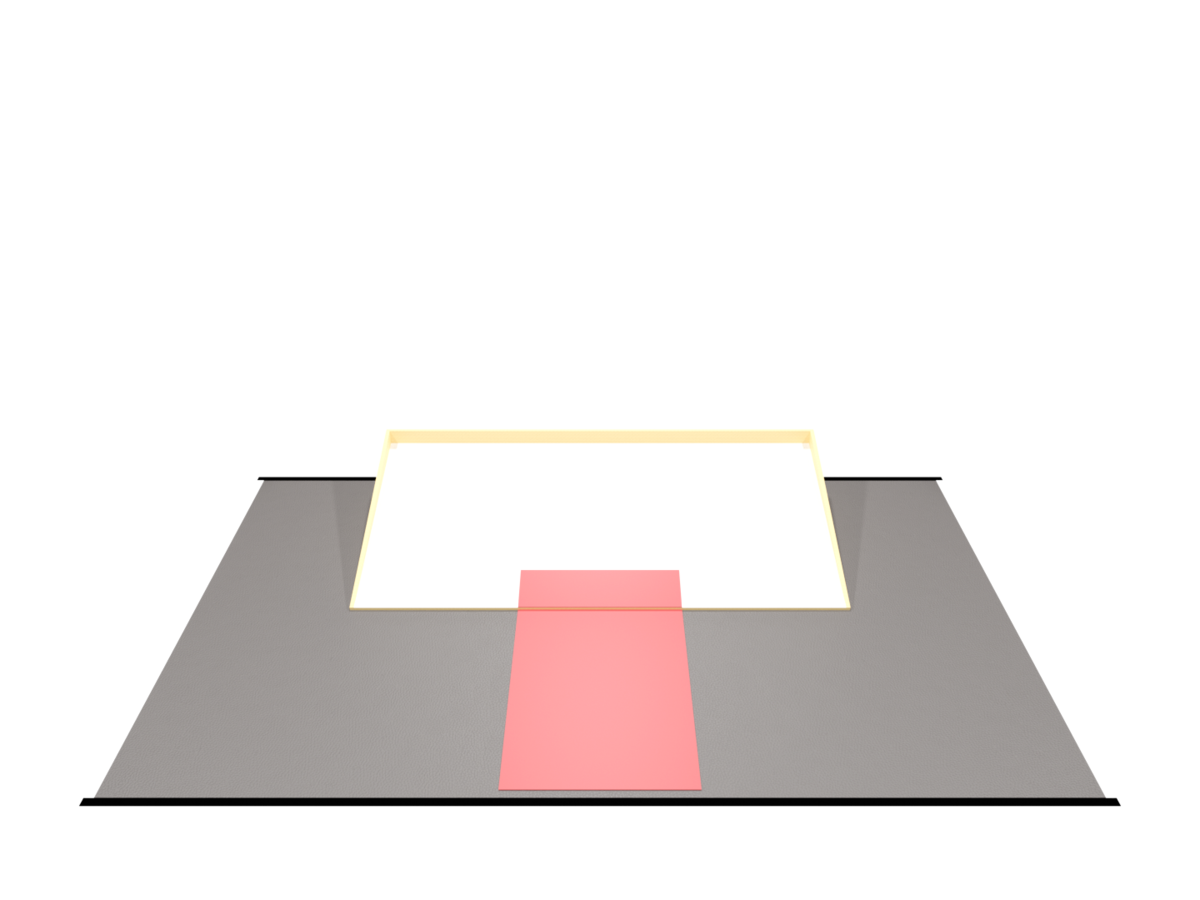
3. Moving Parcel
For most devices, walking in an exoskeleton requires the use of crutches. As a result, it is difficult for a user to carry objects while walking. During in-home use, carrying objects while walking in an exoskeleton can be of high practical value.
In this task, pilots must carry a box to a target location while walking in their exoskeleton.

4. Tilted Path
In daily life, some paths are tilted perpendicular to the direction of travel (e.g., when crossing a steep road). Negotiating a tilted path in an exoskeleton is challenging as it requires abduction/adduction in the hip and pronation/supination in the ankle.
In this task, pilots must negotiate a tilted path.

5. Free Walking
Most current exoskeletons require the use of crutches to maintain balance during walking. Consequently, the arms are not free to be used for other tasks or gestures.
In this task, the pilot must walk a predefined distance without the use of their crutches.

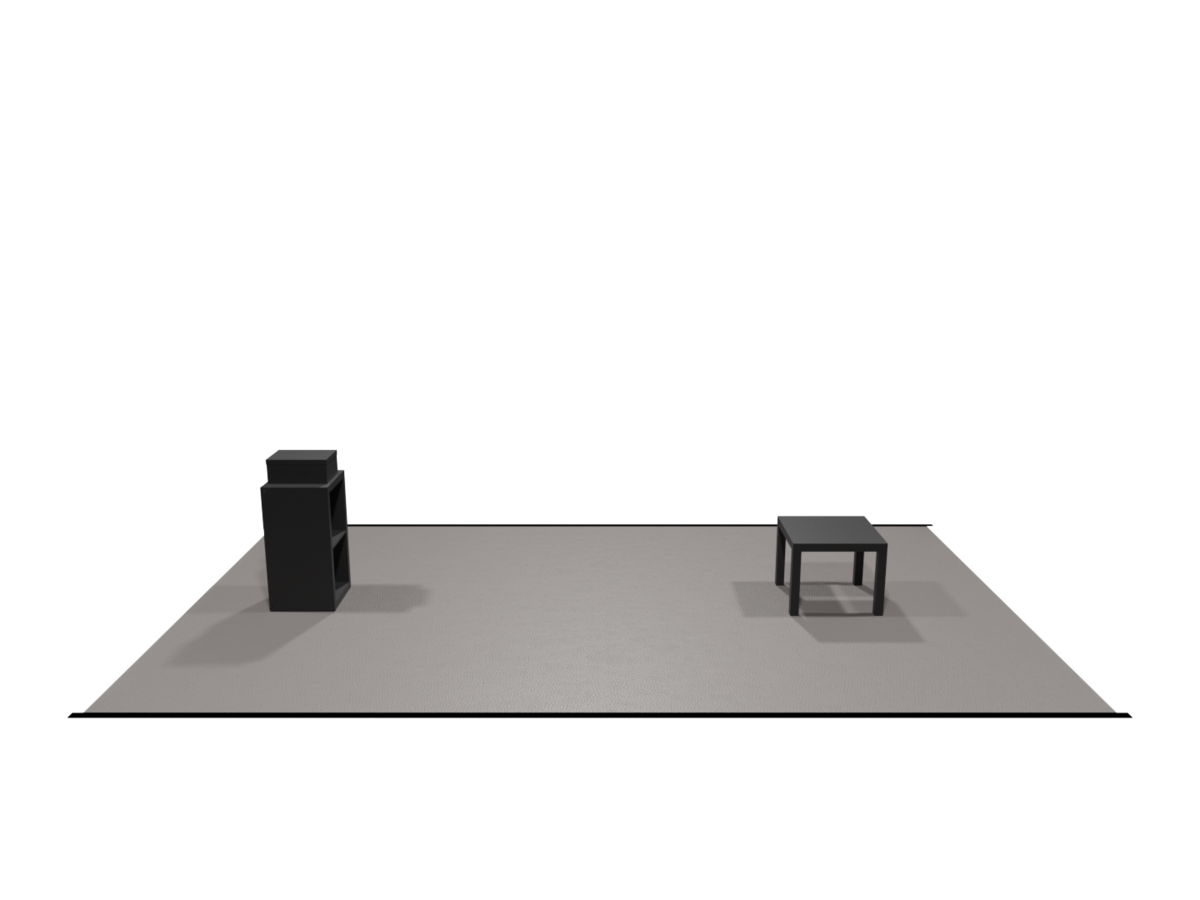
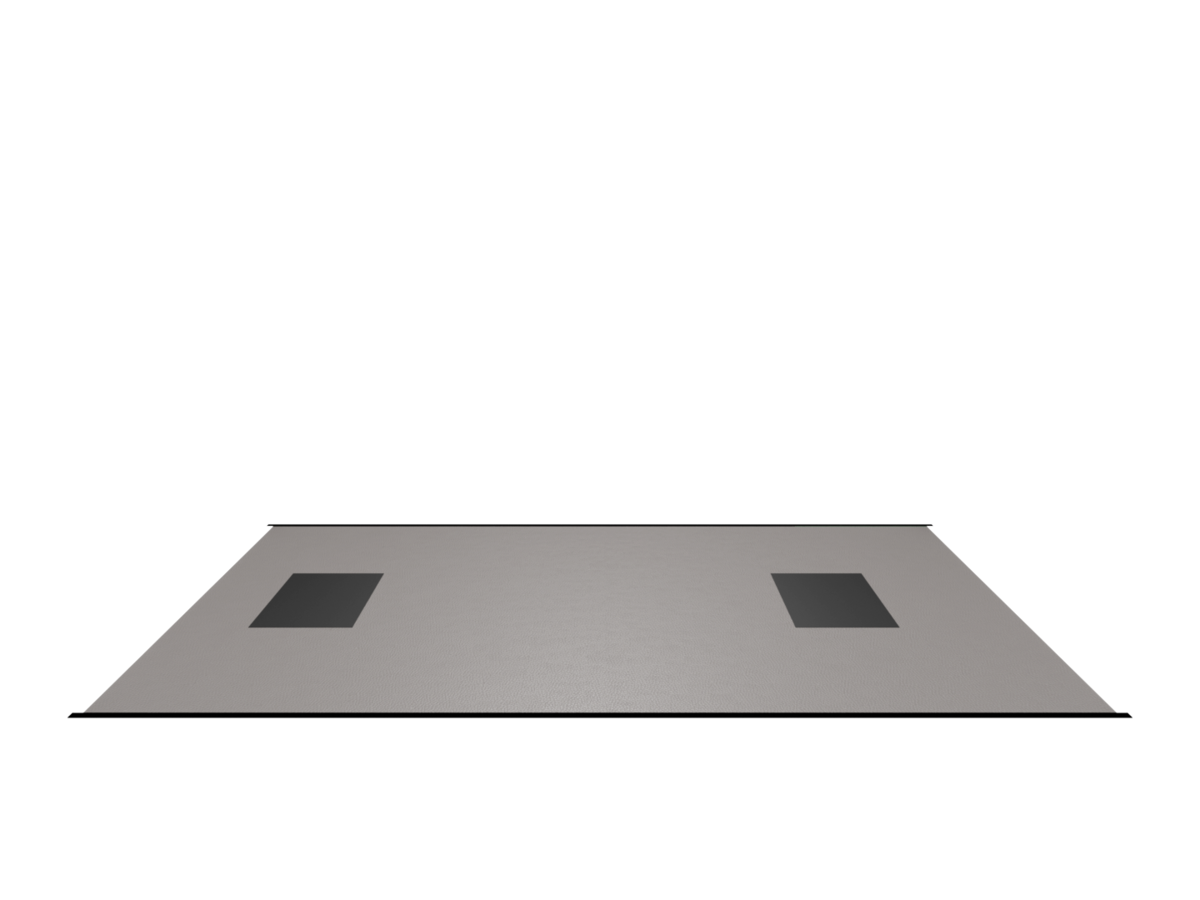
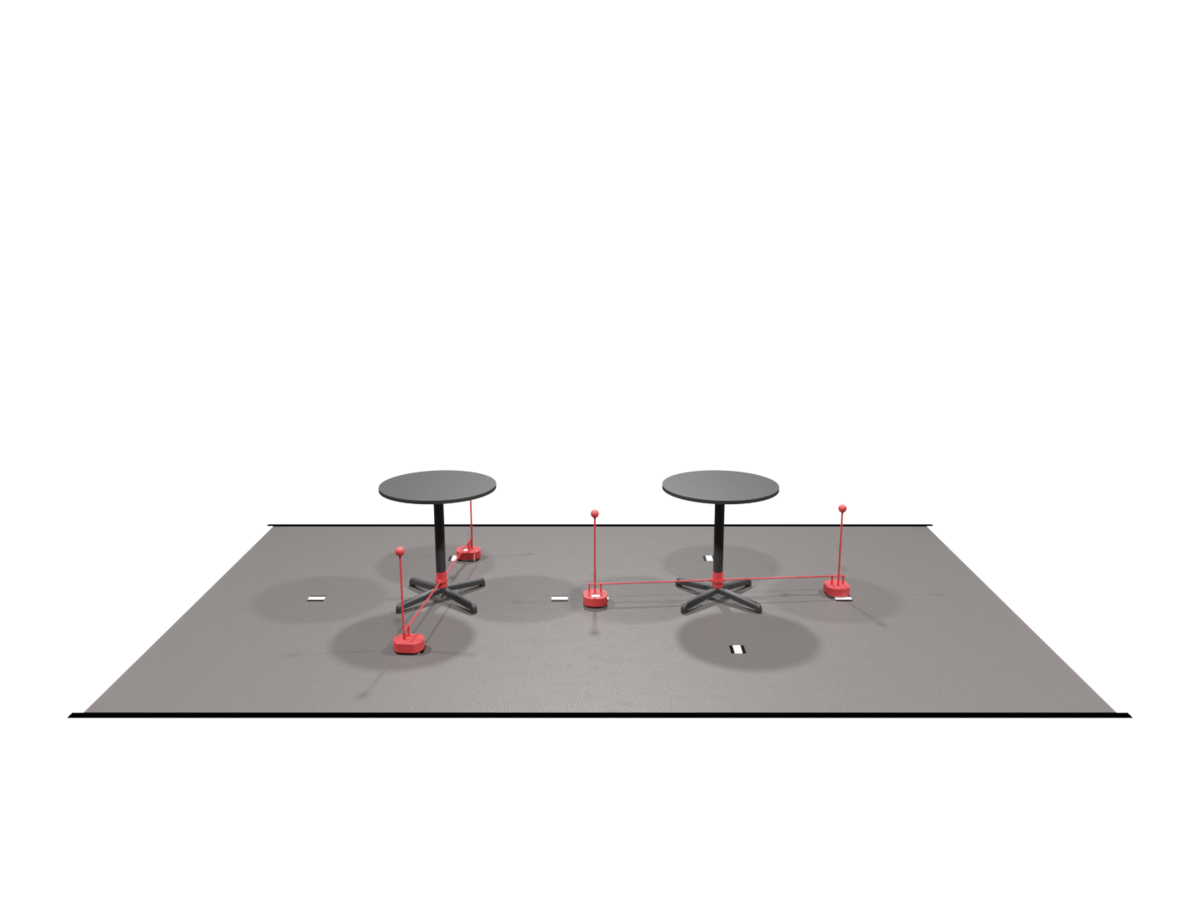
6. Crowd
Often in daily life, it is necessary to navigate around static or moving obstacles to reach a desired destination. When walking in dynamic crowds, in particular, constant control of direction and speed is required to avoid collisions.
In this task, pilots must pass between individual pieces of furniture. In addition, collisions with several robots that are roaming the task space must be avoided.

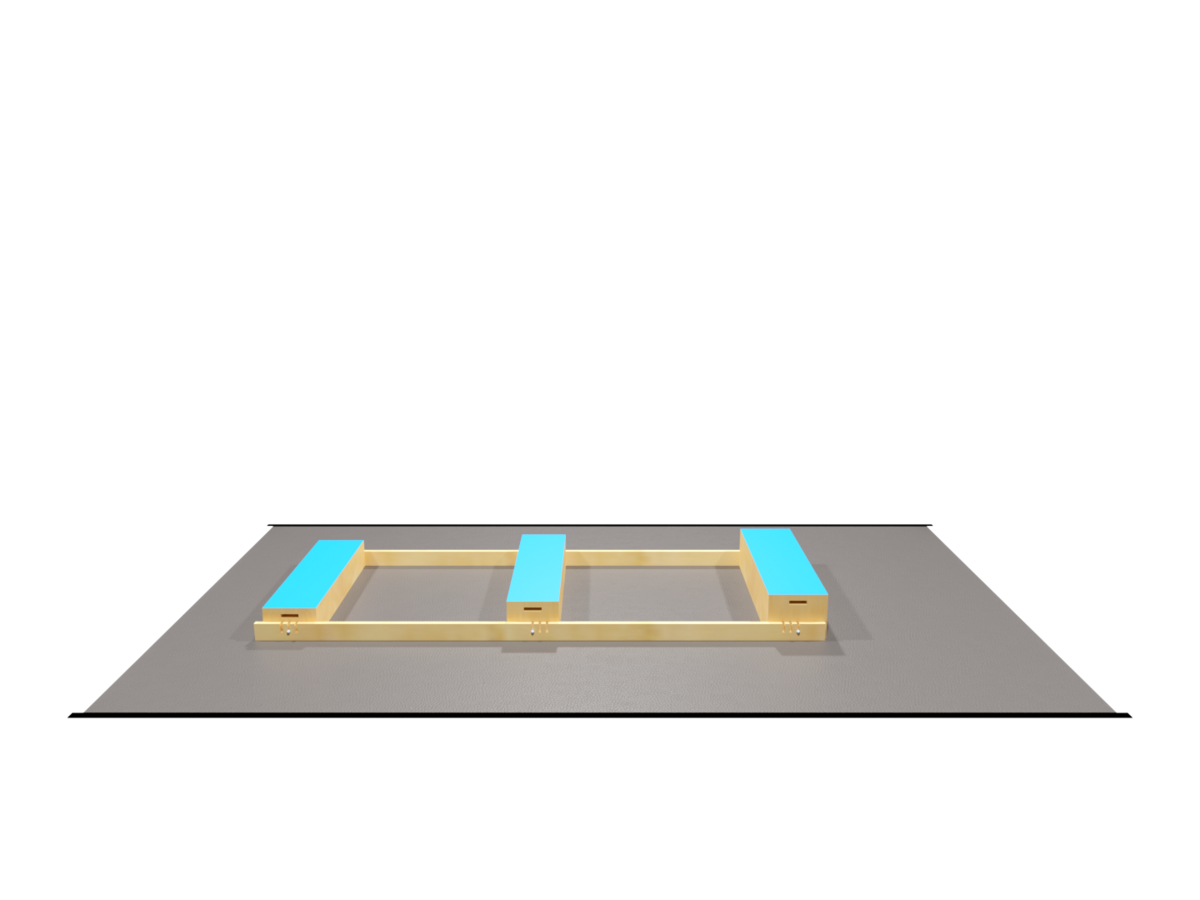
7. High Step
Walking on surfaces that require irregular step lengths and heights is challenging since the position of the foot must be continuously controlled.
In this task, pilots must negotiate a quasi-random sequence of wooden boxes that vary in height and length.

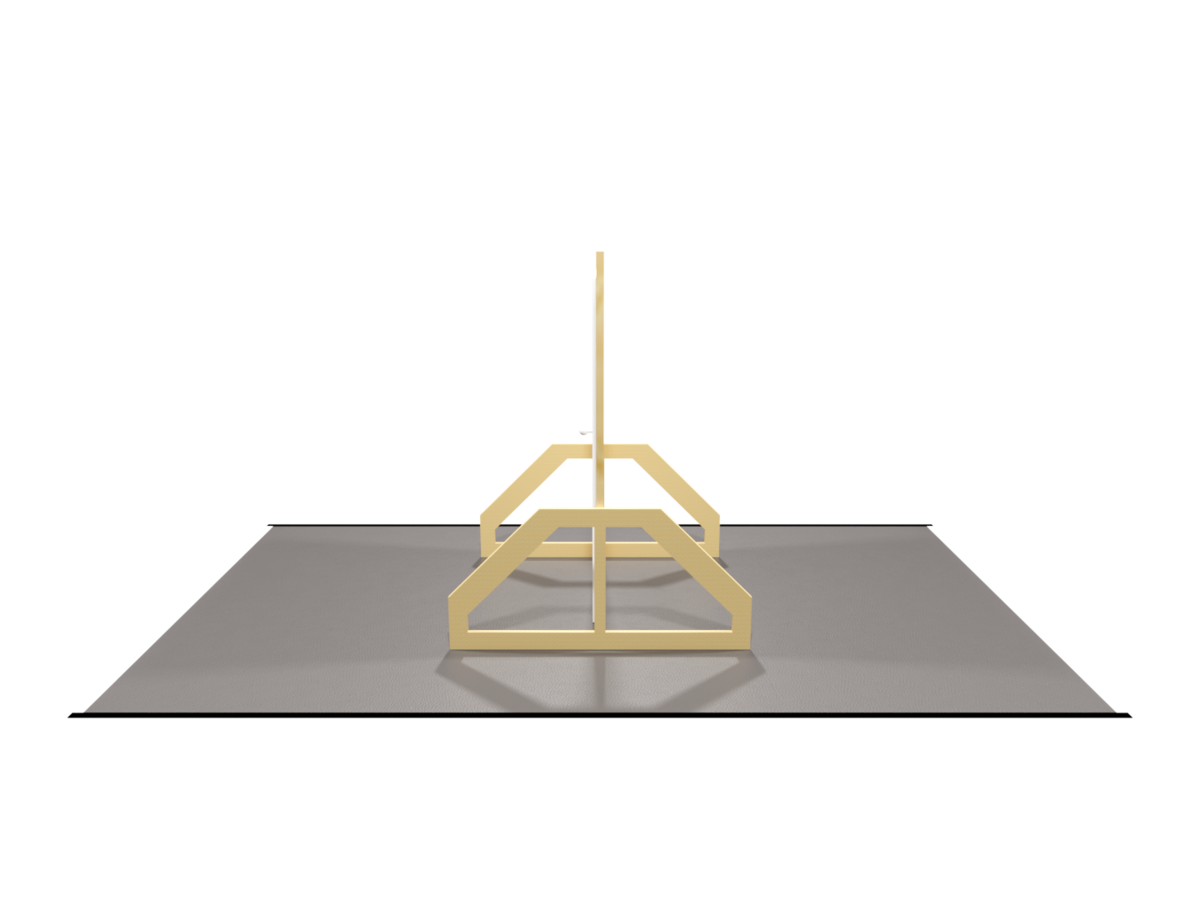
8. Door
Opening and closing doors is challenging for an exoskeleton user since the crutches must be carried and precise foot placement in changing directions (i.e., step backwards and sidewards) is required. There are different mechanisms and technologies to open the door (e.g., door handle or doorknob) and not all doors require the same amount of force to push or pull them open.
In this task, pilots must open, pass through, and close a door.

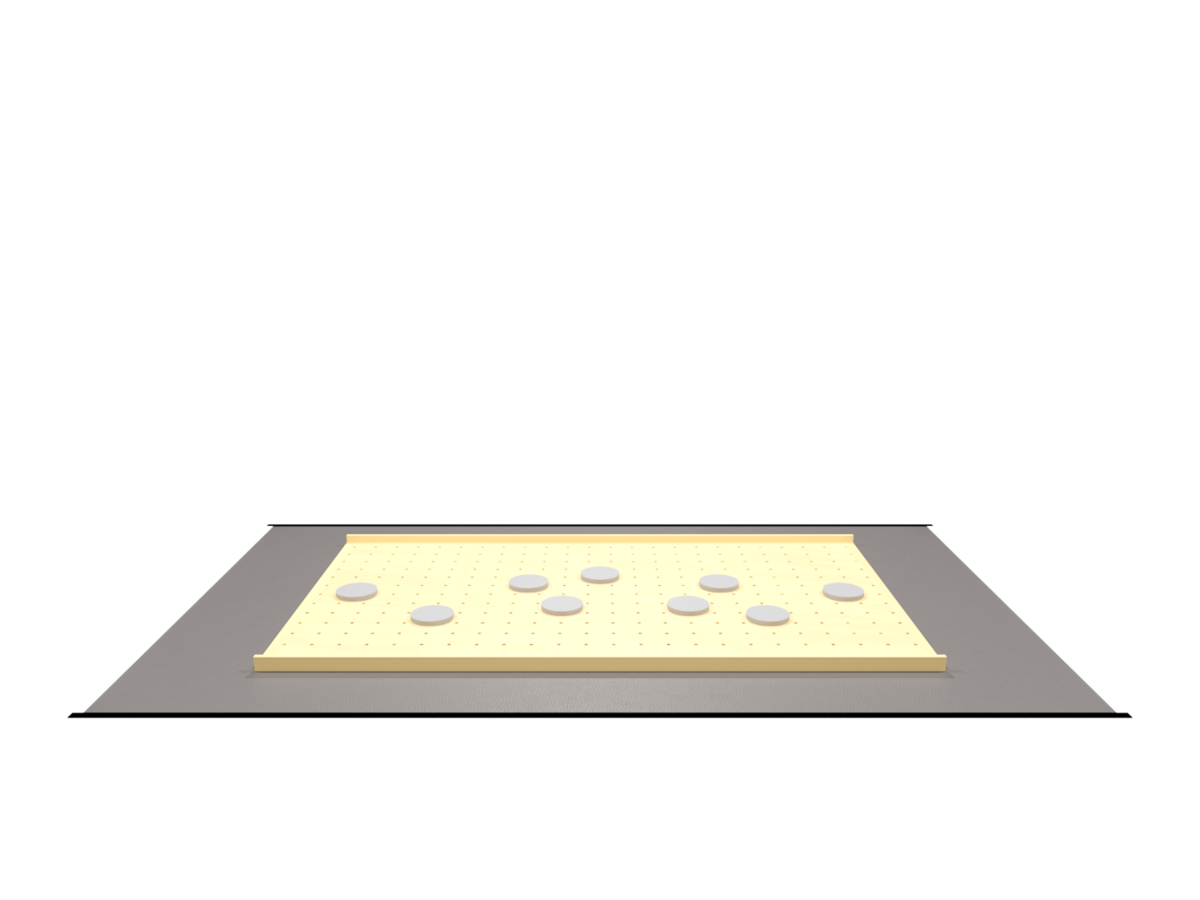
9. Stony Path
In certain situations, in daily life, it is required to accurately control the trajectory of the leg to accommodate for external circumstances (e.g., when entering an escalator or stepping over stones on a cross-country path).
In this task, the pilot is challenged to walk over a series of stones.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
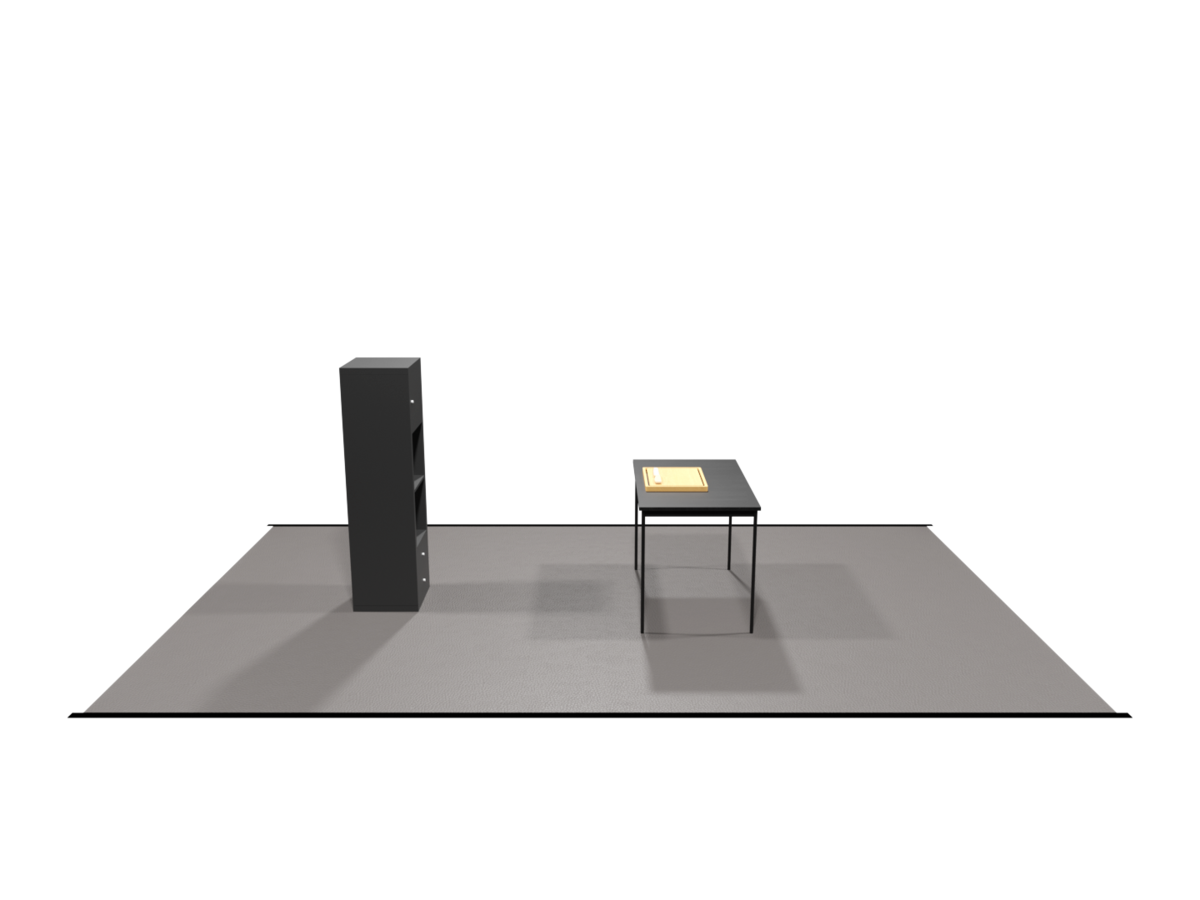
10. Kitchen
For exoskeletons to be practical for everyday use, they must allow their user to perform auxiliary tasks that go beyond the basic walking functions. Such auxiliary tasks are then usually performed with the upper extremities and can involve the manipulation of objects at various levels above the ground.
In this task, pilots must conduct several upper extremity tasks while standing in a kitchen environment in their exoskeleton.